使用三维激光扫描技术获取建筑物完整点云,能够保证立面测量的绘图质量,一套数据即可完成绘图、调绘、质检等多种用途。
而且还可以利用3D MAX和SketchUp软件根据需求实现三维重建,尤其对于结构较为复杂的建筑物,三维激光扫描技术克服了传统测量方式数据量少、施测工作量大、数据不全面的问题,可以较大限度保留真实位置信息。对旧城区建筑物立面的规划和改造,提供了有效的数据支持。
方案实施
本次项目采用天宝X7三维激光扫描仪进行外业数据采集,其扫描精度为2mm,扫描距离为0.6m至80m;扫描一站(自动校准+整平+拍照+扫描)所花费时间仅需2分34秒;X7能够获取精确、清晰、细节丰富的高质量数据。
本案例以其中一栋建筑为例,该建筑结构较为复杂,整栋楼体积较大,附着管道、钢架、空调众多,扫描通视效果一般。为了保证扫描的效率和精度,本次外业数据采集采用X7的在进行外业扫描。

该栋建筑局部实景图
现在外业扫描可以采用无标靶作业方式,扫描作业时只需保证相邻两站之间有一定的重叠度,扫描到相同的平面特征即可,无需使用任何标靶,省去一个摆放标靶的工序,极大提高了外业扫描效率。同时,也省去了相应的摆放标靶的人员,降低了用工成本。

外业扫描现场示意图


外业现场数据拼接及配准示意图
Trimble X7扫描获取的点云数据可以直接通过Trimble RealWorks点云数据处理软件打开扫描工程文件。具体步骤为:
(1) 点云数据分类、分割
点云配准完成后,由于在整体点云中存在车辆、行人、绿化等其他杂物,形成大量杂点,会影响立面图成果的制作,所以我们需要将点云数据进行分类。Trimble RealWorks软件具有自动分类的功能,包括室内分类、户外分类和隧道分类三种。
这里我们采用户外分类的功能,将点云分为地面、建筑、杆柱与标识、电力线、高植被和其它杂点,将分类好的地面、杆柱与标识、电力线、高植被和其它杂点进行隐藏,快速获取出建筑物点云数据,减轻传统手工分割分类和去杂点的负担,大大提供内业处理效率。
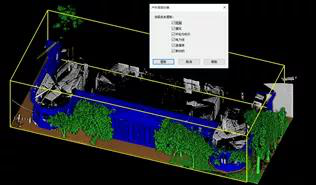
点云自动分类示意图
通过多边形分割工具,将分类出的每栋建筑物点云单独分割成各个墙面,最终将处理好的各个墙面点云数据单独导出。
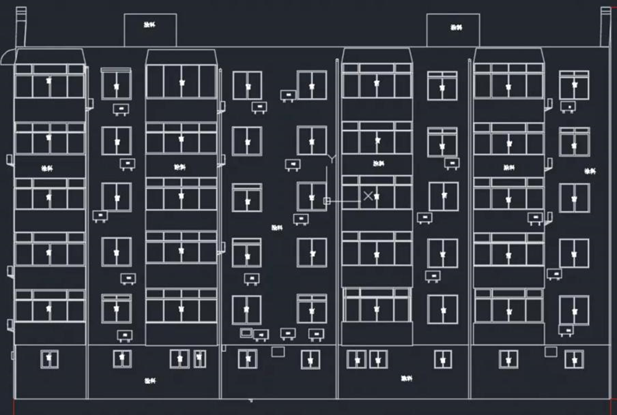
3. 立面绘图
建筑点云处理完成后,将导出的建筑物单面点云数据进行绘图。
首先需要在Autodesk AutoCAD中新建图形,然后附着点云数据。新建不同图层,按照规范要求进行立面图绘制,而且在绘制过程中可以结合现场照片进行辅助。立面绘制成图后,将每栋楼各个立面绘制完成的图形插入到同一个图框中。调整各个面之间的间距,使得图形清晰美观。

立面成果示意图
此次项目中使用Trimble X7三维激光扫描仪进行作业,两名作业人员采集外墙数据信息,共计耗费9小时就完成了整个测区的数据采集。所获取的精确点云数据可为后续旧城改造工作提供了坚实保障。
附:利用点云进行三维重建
以上所得到的点云成果还可以为三维重建提供强有力的支持。可根据不同需求,确定是否进行三维处理。
点云重建工作在3D MAX中完成,首先将建筑物点云数据导入软件中,然后完成以下建模工作。
(1) 墙体窗户的制作
在创建命令中找到图形-矩形,打开三维捕捉,进行图形的创建。然后将需要编辑的线转换成可编辑样条线,附加上另一个矩形。通过挤出命令,输入墙的厚度,墙体即可建模完成。如下图所示。

墙体、窗户建模示意图
选择几何体——楼梯,根据需求选择合适的楼梯模型。根据点云输入实际参数,楼梯即可建模完成。
(3) 模型渲染与贴图
模型构建完成后,需要根据现场采集的纹理数据进行渲染与贴图。通过加载图片功能完成纹理的映射,然后调整渲染参数,即可进行模型的渲染。渲染后的模型如下图所示。

渲染后的建筑模型示意图
精细化立面二维线划图

 在线咨询
在线咨询